00:00:00
vex LemLib的驾驶员控制
介绍
在本教程中,我们将学习如何对传动系统进行编程,以实现控制器操纵杆输入。
控制器
控制器有两个操纵杆。一个“左”操纵杆和一个“右”操纵杆。每个操纵杆有两个轴,一个“x”轴和一个“y”轴。我们将使用这些轴来控制传动系统。
坦克驾驶
坦克驾驶是一种控制传动系统的简单方法。你为左轮提供动力,为右轮提供动力。在这个例子中,我们将使用“左 y”轴和“右 y”轴。
cpp
pros::Controller controller(pros::E_CONTROLLER_MASTER);
void opcontrol() {
// 永远循环
while (true) {
// 获取左 y 和右 y 位置
int leftY = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_Y);
int rightY = controller.get_analog(pros::E_CONTROLLER_ANALOG_RIGHT_Y);
// 移动机器人
chassis.tank(leftY, rightY);
// 延迟以节省资源
pros::delay(25);
}
}街机驾驶
街机驾驶是控制机器人最流行的形式。在街机控制中,我们给机器人一个前进/后退速度和一个转弯速度。下面是两个例子:单杆街机和双杆街机。
单杆街机
cpp
pros::Controller controller(pros::E_CONTROLLER_MASTER);
void opcontrol() {
// 永远循环
while (true) {
// 获取左 y 和右 x 位置
int leftY = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_Y);
int leftX = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_X);
// 移动机器人
chassis.arcade(leftY, leftX);
// 延迟以节省资源
pros::delay(25);
}
}双杆街机
cpp
pros::Controller controller(pros::E_CONTROLLER_MASTER);
void opcontrol() {
// 永远循环
while (true) {
// 获取左 y 和右 x 位置
int leftY = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_Y);
int rightX = controller.get_analog(pros::E_CONTROLLER_ANALOG_RIGHT_X);
// 移动机器人
chassis.arcade(leftY, rightX);
// 延迟以节省资源
pros::delay(25);
}
}油门/转向优先级
本节是可选的,不是控制机器人所必需的。
你可以优先考虑转向而不是转弯,反之亦然。例如,你可以完全优先考虑转向,以便对于给定的转向输入,无论油门输入如何,机器人的角速度都保证相同。使用 LemLib,你可以通过一个设定的量(从 0 到 1)优先考虑转向而不是油门。0.5 是默认值,此时转向和转弯具有相同的优先级。0 完全优先考虑油门,而 1 完全优先考虑转向。请参见下面的代码块:
cpp
pros::Controller controller(pros::E_CONTROLLER_MASTER);
void opcontrol() {
// 永远循环
while (true) {
// 获取左 y 和右 x 位置
int leftY = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_Y);
int leftX = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_X);
// 移动机器人
// 稍微优先考虑转向
chassis.arcade(leftY, leftX, false, 0.75);
// 延迟以节省资源
pros::delay(25);
}
}曲率驾驶
曲率驾驶是一种不太为人所知但功能强大的方法。我们给机器人一个前进/后退速度和一个弧线的曲率。曲率越大,机器人转弯越多。它与街机驾驶类似,但在转弯时表现更好。下面是单杆和双杆曲率驾驶的示例:
单杆曲率
cpp
pros::Controller controller(pros::E_CONTROLLER_MASTER);
void opcontrol() {
// 永远循环
while (true) {
// 获取左 y 和右 x 位置
int leftY = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_Y);
int leftX = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_X);
// 移动机器人
chassis.curvature(leftY, leftX);
// 延迟以节省资源
pros::delay(25);
}
}双杆曲率
cpp
pros::Controller controller(pros::E_CONTROLLER_MASTER);
void opcontrol() {
// 永远循环
while (true) {
// 获取左 y 和右 x 位置
int leftY = controller.get_analog(pros::E_CONTROLLER_ANALOG_LEFT_Y);
int rightX = controller.get_analog(pros::E_CONTROLLER_ANALOG_RIGHT_X);
// 移动机器人
chassis.curvature(leftY, rightX);
// 延迟以节省资源
pros::delay(25);
}
}但我该选择哪种呢?
这个问题没有正确答案。驾驶员应该使用他们觉得最舒服的控制方法。
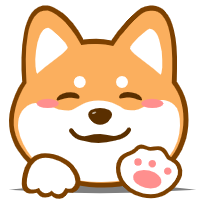
输入缩放
本节是可选的,不是控制机器人所必需的。
坦克控制仅使用油门曲线,不使用转向曲线。
进行精确的移动很困难。要是有一种方法能使其不那么敏感,但又不限制最大速度就好了。嗯,有一种方法,它叫做输入缩放。输入缩放不是控制器输入和传动系统输出之间的常规线性关系,而是一种指数关系,以使小移动不那么敏感,以换取使快速移动更敏感。下面是这种关系的图像:

代码
cpp
// 驾驶员控制期间油门输入的输入曲线
lemlib::ExpoDriveCurve throttle_curve(3, // 操纵杆死区,取值范围为 127
10, // 传动系统开始移动的最小输出,取值范围为 127
1.019 // 指数曲线增益
);
// 驾驶员控制期间转向输入的输入曲线
lemlib::ExpoDriveCurve steer_curve(3, // 操纵杆死区,取值范围为 127
10, // 传动系统开始移动的最小输出,取值范围为 127
1.019 // 指数曲线增益
);
// 创建底盘
lemlib::Chassis chassis(drivetrain,
lateral_controller,
angular_controller,
sensors,
&throttle_curve,
&steer_curve
);结论
这就是关于驾驶员控制的全部内容。我们将在下一个教程中介绍自主运动和调整。
本文来自 [LemLib](https://lemlib.readthedocs.io/en/stable),经翻译发布于此以供大家学习使用!侵删!### 三级标题